Hengjiang Intelligent Technology Co., Ltd. è un produttore e fornitore professionista di sistemi robotici per la cottura e attrezzature di automazione industriale di grado alimentare. Il nostro portafoglio di prodotti comprende robot autonomi Delta e SCARA, postazioni di lavoro robotiche flessibili e sistemi di selezione e confezionamento a linea completa — tutti progettati per operazioni ad alta velocità, alta precisione e igieniche in ambienti moderni di panificazione e produzione di alimenti surgelati. Che tu stia cercando un robot monounità per automatizzare un nodo di processo o una linea completa chiavi in mano per la produzione di ciambelle, pizza o torta d'uova, Hengjiang offre soluzioni scalabili e modulari che riducono i costi di manodopera, eliminano errori umani e aumentano la capacità produttiva per soddisfare le esigenze degli standard delle fabbriche intelligenti.
Come esperienzaProduttori di robot Delta, Hengjiang progetta e produce i manipolatori paralleli della serie HJ-D11003-1 da zero, coprendo la struttura meccanica, il firmware del controllo del movimento e gli strumenti degli effettori finali. Un robot delta opera su un'architettura cinematica parallela: tre bracci azionati indipendentemente sono collegati a un telaio superiore fisso e tutti gli attuatori dei giunti rimangono sulla base ferma invece di muoversi con l'assemblaggio del braccio. Questo mantiene la massa in movimento estremamente bassa, che è il motivo principale per cui i robot delta possono raggiungere velocità di ciclo e accelerazioni che i robot a braccio seriale non possono eguagliare.
Architettura tecnica della serie HJ-D11003-1: i tre bracci superiori sono azionati da servomotori montati concentricamente sulla piastra di base. I collegamenti inferiori in fibra di carbonio o alluminio trasmettono il movimento alla piattaforma centrale mobile tramite giunti a sfera e bussola, eliminando il gioco di gioco. La variante standard senza asse rotante gestisce il pick-and-place puro XYZ, mentre la variante con asse rotante aggiunge un quarto asse (asse R) all'effettore terminale, consentendo la correzione dell'orientamento durante il picking — fondamentale quando i prodotti arrivano ad angoli casuali sul nastro trasportatore di ingresso. La capacità di carico è destinata a prodotti leggeri (tipicamente inferiori a 3 kg per unità), con diametri di inviluppo di lavoro comunemente nell'intervallo 800–1.100 mm e corsa verticale fino a 300 mm.
Integrazione di controllo e visione: Ogni robot è abbinato a un armadio servo e a un controller dedicato che utilizza il software di pianificazione del movimento di Hengjiang. La visione artificiale è gestita da una telecamera industriale montata coassialmente sopra il nastro trasportatore. Il sistema di visione trasmette in tempo reale dati sulla posizione del prodotto e sugli angoli al controllore, che poi calcola le singole assegnazioni di pick-up robot all'interno del cluster multi-robot. Il protocollo di comunicazione tra l'host di visione e il robot controller utilizza Ethernet industriale standard (EtherCAT o Modbus TCP), permettendo l'integrazione con sistemi SCADA di terze parti senza middleware aggiuntivi.
Considerazioni igieniche di progettazione: Tutte le superfici esposte alla zona alimentare utilizzano fissaggi in acciaio inox 304 o 316 e alloggiamenti in polimero sicuri per il consumo. Le custodie motori con classificazione IP65 impediscono l'ingresso di vapore e l'acqua di lavaggio. La gestione dei cavi invoglia il cablaggio attraverso canali sigillati, eliminando superfici orizzontali dove potrebbero accumularsi detriti.
Prodotti applicabili: ciambelle, ravioli, panini al vapore, croissant, crostatine all'uovo, pezzi di cioccolato e altri prodotti formati o modellati. L'HJ-D11003-1 è disponibile sia in configurazioni non rotanti che ad asse rotante; Consulta ogni pagina di dettaglio del modello per parametri cinematici esatti, inviluppi di portata e classificazioni del carico utile.
Per aziende che valutanoProduttori di robot Deltaa livello globale, Hengjiang offre test di accettazione in fabbrica (FAT), supporto per la messa in servizio remota e cooperazione OEM/ODM. Dimostrazioni video di riferimento di robot delta nelle file di smistamento live per ciambelle e pizza sono disponibili nelBiblioteca video di robot da cottura.
ComprensionePrezzo del robot SCARAFattori è essenziale prima di impegnarsi in un progetto di automazione. I robot SCARA (Selective Compliance Assembly Robot Arm) di Hengjiang sono sviluppati e prodotti in modo indipendente, il che significa che il prezzo riflette il valore ingegneristico reale piuttosto che i margini del distributore. L'attuale gamma comprende quattro modelli — HJ-SC1250-R, HJ-SC1050-R, HJ-SCD0625A e HJ-SCD7840 — differenziati per la portata del braccio (da 625 mm a 1.250 mm), il carico utile (da 5 kg a 30 kg) e la corsa dell'asse Z.
Cosa determina il prezzo dei robot SCARA? Cinque fattori principali regolano il costo finale di un sistema SCARA di qualità alimentare:
Portata del braccio e classe di carico utile: Una gittata più lunga e un carico utile più elevato richiedono componenti strutturali più pesanti e servoazionamenti più grandi, aumentando direttamente il costo unitario. L'HJ-SC1250-R, ad esempio, copre una portata di 1.250 mm con una capacità di carico utile di 30 kg, adatta alla gestione a livello pallet, mentre l'HJ-SCD0625A punta a una selezione di precisione a una portata di 625 mm con un inviluppo di carico più leggero e un prezzo di conseguenza più basso.
Numero degli assi: I robot SCARA standard operano su quattro assi (rotazione J1, rotazione J2, lineare Z, rotazione polso R). Alcune configurazioni aggiungono un quinto asse per compiti di orientamento complessi. Assi aggiuntivi aumentano il numero di servo e la complessità del controllore, influenzando il prezzo.
Includenza del sistema di visione: un'unità robotica autonoma quotata senza sistema di visione rappresenta il prezzo base. Quando viene integrato con il modulo di visione artificiale integrato di Hengjiang — fotocamera industriale ad alta risoluzione, illuminazione ad anello LED, unità di elaborazione immagini in tempo reale e software di calibrazione — il prezzo del sistema aumenta ma offre una soluzione chiavi in mano pronta per l'implementazione immediata.
Configurazione di montaggio: La serie HJ supporta di serie l'installazione a soffitto (invertita), ottimizzando lo spazio a terra e migliorando l'accessibilità per la pulizia. I telai personalizzati per cavalletti da pavimento o i montaggi per layout speciali comportano costi aggiuntivi di ingegneria e fabbricazione.
Sistema di controllo e licenza software: Il cabinet integrato di controllo di Hengjiang combina servoamplificatori, il controller di movimento robotico, relè di sicurezza e il touchscreen HMI in un unico involucro. La piattaforma software sviluppata da se stessa supporta il monitoraggio remoto, gli aggiornamenti firmware via etere e la gestione delle ricette per linee multiprodotto, il tutto incluso nel pacchetto standard.
Specifiche tecniche chiave SCARA: La precisione del posizionamento ripetuto è di ±0,025 mm su tutti e quattro gli assi, validata in un test di resistenza di 100.000 cicli. La velocità lineare massima dell'effettore finale raggiunge 2 m/s. L'intero corpo del robot pesa circa 40 kg, semplificando i requisiti strutturali superiori. Tutte le giunzioni sono sigillate al minimo IP54, con IP65 disponibile per ambienti di lavaggio.
Per prezzi dettagliati di ogni modello e configurazione, contatta il team vendite di Hengjiang tramite ilIndagine onlinepagine.
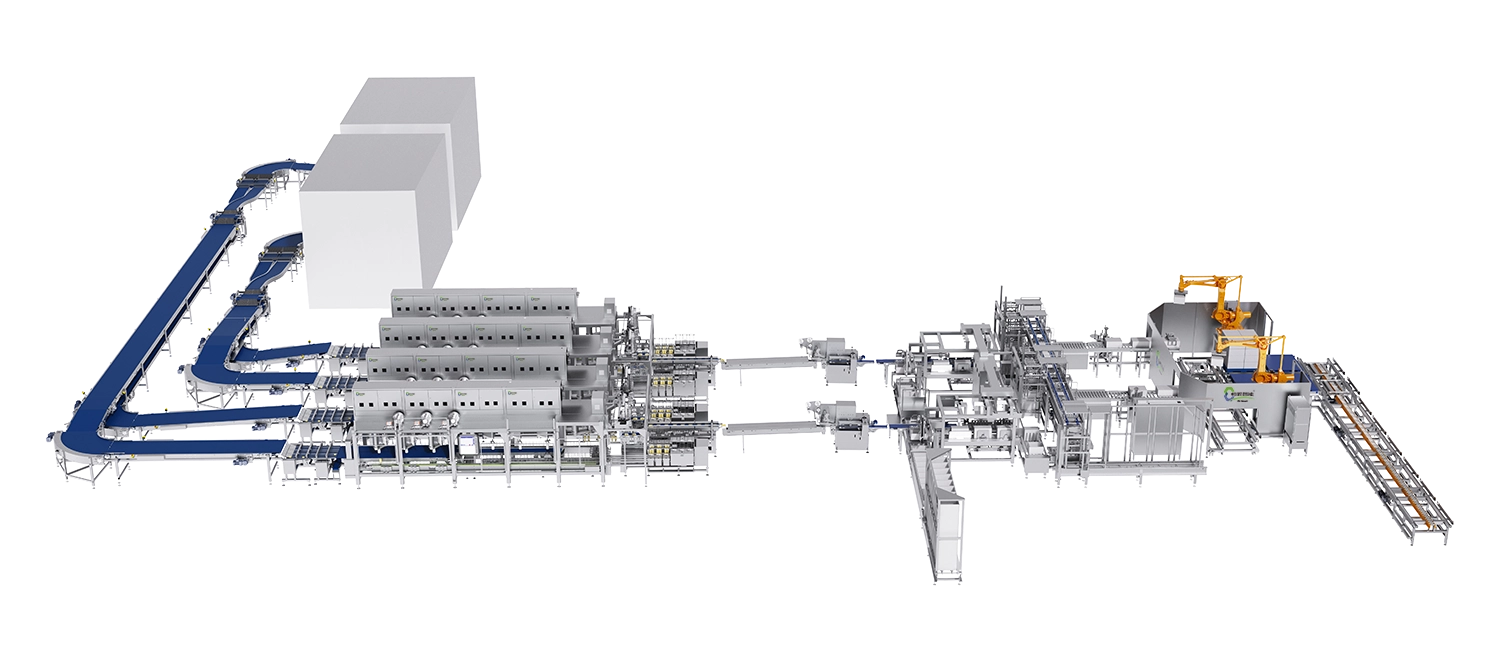
IlStazione di lavoro robotica SCARAda Hengjiang è una cella di automazione pre-progettata che integra un robot SCARA di qualità alimentare, visione artificiale, nastri trasportatori di ingresso e uscita, un telaio in acciaio inox, protezione di sicurezza e un armadio di controllo unificato in un'unica unità dispiegabile. Questa integrazione a livello di workstation riduce significativamente il tempo di ingegneria in loco rispetto all'acquisto di singoli componenti e all'integrazione indipendente.
Architettura centrale della workstation: La disposizione della cella posiziona centralmente il robot SCARA sopra il nizzatore di alimentazione. Una stazione di visione a monte dell'inviluppo di lavoro del robot cattura immagini di ogni prodotto in arrivo. Le coordinate processate vengono inoltrate al robot controller tramite EtherCAT entro 20 ms di latenza, assicurando che il robot riceva dati di prelievo accurati prima che il prodotto raggiunga la zona di prelievo. I nastri trasportatori di uscita su uno o entrambi i lati trasportano i prodotti selezionati verso le stazioni di imballaggio a valle o di carico a vassoio.
L'applicazione di punta dimostrata a Hengjiang è la Workstation per la Selezione e Impilamento del Guscio di Torta d'Uovo Congelata. In questa configurazione, i gusci di crostata d'uovo appena smoldati e surgelati arrivano sulla nastro di alimentazione in orientamenti casuali. Il sistema di visione identifica la posizione centrale e l'angolo di orientamento di ogni proiettile. Il robot SCARA seleziona ogni guscio e lo posiziona in una posizione di impilo designata con ±0,02 mm di ripetibilità, formando pile uniformi di un conteggio preimpostato che vengono poi trasferiti alla stazione di imballaggio. La cella raggiunge velocità di produzione superiori a quelle che tre o quattro operatori manuali possono produrre, senza alcuna contaminazione da contatto umano.
Dettagli igienici della costruzione: Il telaio della postazione è completamente saldato in acciaio inossidabile 304 con superfici elettrolucidate. I nastri trasportatori utilizzano materiale PU di qualità alimentare. Tutti i componenti pneumatici per la presa dell'effettore finale sono montati all'interno dell'alloggiamento sigillato del braccio robotico, non esposti esternamente. L'armadietto elettrico è installato fuori dalla zona alimentare per evitare che il calore e le interferenze elettromagnetiche influenzino la qualità del prodotto.
Scalabilità: Una singola workstation SCARA può essere gestita autonomamente o collegata in rete in una più grandeLinea di confezionamento per robot SCARAQuesto include il carico automatico dei vassoi, l'imballaggio e l'imballaggio delle valigie. L'architettura di comunicazione modulare (compatibile con OPC-UA) consente alla workstation di riportare i dati di produzione — conteggio ciclico, tasso di scarto, telemetria della forza di presa — a un sistema centrale MES o ERP.
Questa workstation è anche il percorso di integrazione di base per i produttori che vogliono automatizzare un passaggio di processo prima di impegnarsi su una soluzione full-line. Vedi ilServizio e supportosezione dedicata all'installazione, ai test di accettazione e ai dettagli della formazione degli operatori.
IlStazione di lavoro robot Deltada Hengjiang configura uno o più robot delta HJ-D11003-1 sopra un nastro trasportatore condiviso, con un sistema di visione unificato che gestisce le assegnazioni di previsione su tutti i robot del cluster. Questa architettura multi-robot è l'approccio standard del settore per raggiungere una velocità molto elevata su linee di ingresso a rapido movimento, dove un singolo robot sarebbe il collo di bottiglia.
Stazione di lavoro a delta singola: Un singolo HJ-D11003-1 montato sopra una larghezza di 500–800 mm con maniglia a nastro che arriva a velocità fino a circa 60–80 pickup al minuto a seconda della geometria del prodotto e del tempo di ciclo delle prese. Il sistema di visione illumina la cintura con un array LED strutturato, cattura immagini a una velocità di innesco programmata e fornisce dati sulla posizione XY più l'angolo per ogni prodotto rilevato. Il robot controller mantiene una coda di picks in sospeso, eseguendoli nella sequenza che minimizza la distanza di percorrenza del braccio (scheduling del vicino più prossimo), massimizzando la portata efficace.
Cluster delta multi-unità: Quando la velocità della linea o la densità del prodotto superano la capacità di un singolo robot, due, tre o più robot delta sono disposti in serie lungo la direzione del trasportatore. L'host a visione condivisa assegna ogni prodotto in arrivo a un robot specifico in base alla zona di posizione e alla disponibilità del robot (bilanciamento del carico). Se un robot è impegnato a completare una scelta precedente, l'assegnazione avanza all'unità disponibile successiva. Questa programmazione cooperativa garantisce che nessun prodotto esca dalla zona di prelievo senza essere gestito in condizioni operative normali.
Applicazione per la smistatura delle ciambelle: nell'applicazione Donut Robot Sorting Workstation, Hengjiang utilizza un cluster delta multi-robot per ordinare ciambelle appena fritte o congelate per dimensione, forma e spaziatura in vassoi o stampi di imballaggio. Il modulo di rilevamento dei difetti del sistema visionario controlla contemporaneamente la presenza di ciambelle rotte o malformate, deviando i rifiuti verso una corsia separata. L'intera cella interagisce direttamente con quella di HengjiangLinea di produzione per la formatura delle ciambellea monte, creando un flusso automatizzato continuo dalla modellatura dell'impasto alla selezione e al confezionamento.
Opzioni di utensili per effettori finali: Hengjiang fornisce pinze proprietarie abbinate a prodotti da forno comuni — ventose a vuoto in silicone di qualità alimentare per prodotti a superfici lisce, dita meccaniche adattive per forme irregolari e strumenti a schiera di aghi per dolci delicati a strati. I sistemi di cambio rapido a effettori finali permettono agli operatori di cambiare tipo di prodotto in meno di due minuti senza attrezzi.
Sicurezza e conformità: Ogni postazione di lavoro include tende luminose su tutti i punti di accesso degli operatori, circuiti di arresto d'emergenza e moduli relè certificati di sicurezza conformi a ISO 13849 PLd. Il software di controllo applica limiti di velocità e forza quando la tenda luminosa di sicurezza è parzialmente bloccata (modalità a velocità ridotta) invece di effettuare un fermo brusco, minimizzando l'interruzione della produzione durante un breve ingresso dell'operatore.
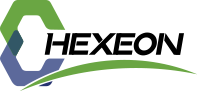
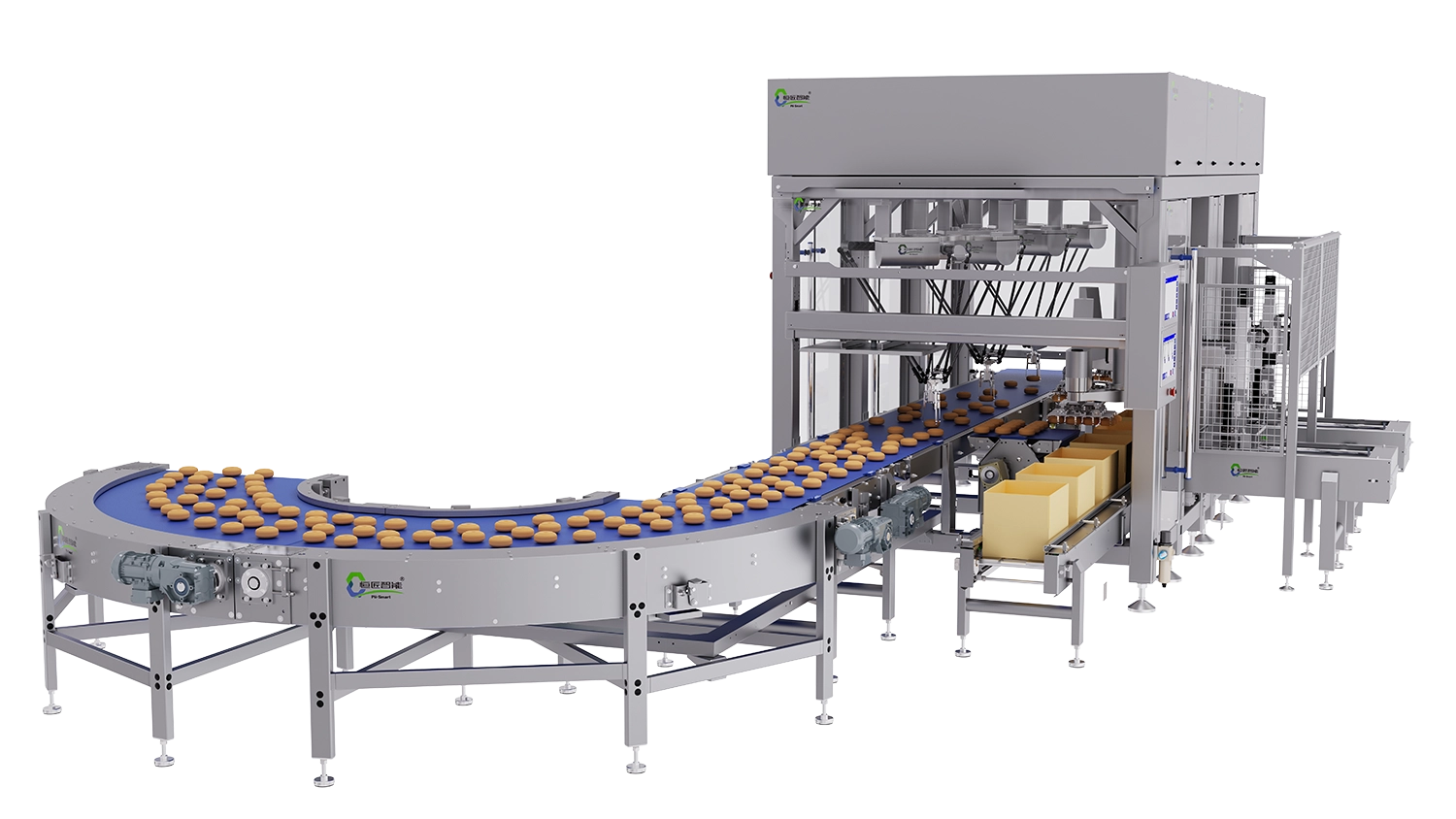
IlLinea di confezionamento per robot SCARAda Hengjiang è un sistema di produzione completo che prende prodotti alimentari non smistati all'ingresso e consegna cartoni o vassoi riempiti e sigillati all'uscita — senza interventi manuali tra questi due punti. Questa soluzione a livello di linea rappresenta il più alto livello di integrazione nel portafoglio robotico di Hengjiang ed è progettata per i produttori che utilizzano SKU di grande volume con rigorosi requisiti di coerenza di produzione.
Architettura del sistema: La linea è composta da sei zone funzionali disposte in layout lineari o a L per adattarsi allo spazio disponibile in fabbrica. La zona 1 è il buffer di alimentazione, dove i prodotti provenienti da un processo di cottura o congelamento a monte vengono ricevuti su un nastro trasportatore di espansione che li disperse in un unico strato per l'ispezione visiva. La Zona 2 è la stazione di ispezione a visione, che esegue l'ispezione del prodotto al 100% per dimensioni, forma, uniformità del colore e difetti superficiali. La zona 3 è la zona di picking dei robot SCARA, dove uno o due robot SCARA eseguono un pick-and-place coordinato dei prodotti accettati in vassoi o stampi di imballaggio posizionati su un nastro trasportatore di indicizzazione parallelo. La Zona 4 gestisce la verifica del riempimento dei vassoi tramite una bilancia di controllo del peso integrata nell'uscita della zona robotica. La zona 5 è il modulo automatico di coperchimento o cartonaggio dei vassoi, che applica coperchi di pellicola o carta e sigilla i bordi dei vassoi. La Zona 6 è il modulo di imballaggio e pallettizzazione delle case, che raggruppa i vassoi sigillati in casse di spedizione e li impila su pallet.
Applicazione: Linea di produzione per la selezione e il confezionamento di gusci di crostata d'uovo congelata. I gusci di crostate d'uovo surgelate smoldicate entrano in fila alla Zona 1 a velocità fino a 200 pezzi al minuto. Il sistema visivo nella Zona 2 identifica e respinge gusci rotti o deformati (tipicamente meno del 2% della produzione in una linea di formatura ben mantenuta). I robot SCARA nella Zona 3 posizionano i gusci accettati in vassoi di plastica a 6 o 12 cavità indicizzati sul nastro trasportatore parallelo con una precisione di posizionamento dei vassoi di ±0,5 mm. La linea completata consegna vassoi sigillati e etichettati, pronti per la distribuzione della catena fredda. Vedi il monte.Linea di produzione per formare la crostata d'uovo in stile Hong Kongper contestualizzarsi su come vengono prodotti i gusci formati prima di entrare in questo sistema di selezione e confezionamento.
Integrazione dei controlli: L'intera linea funziona su un unico PLC di supervisione con un HMI touchscreen da 21 pollici. Il sub-controllore di ogni zona comunica con il PLC supervisore tramite PROFINET. Gli operatori possono monitorare in tempo reale la capacità di throughput, la cronologia degli allarmi, i tassi di rifiuto e le metriche OEE (Overall Equipment Effectiveness). Il sistema supporta l'archiviazione delle ricette per più SKU di prodotto; il passaggio tra SKU richiede solo una selezione di ricetta sull'HMI più un cambio fisico di effetto finale e formato del vassoio, realizzabile in meno di 15 minuti.
Superficie e utilità: Una fila completa per i gusci di crostata d'uovo occupa circa 15–20 m di lunghezza e 3–4 m di larghezza. Il fabbisogno di potenza è di 380V trifase, 50 Hz, tipicamente con un carico totale collegato di 15–25 kW. È necessaria aria compressa a 0,6 MPa per l'azionamento delle pinze e la serratura pneumatica delle vassoie. Le connessioni idriche per il CIP (Clean-In-Place) sono opzionali a seconda della classificazione delle zone igieniche della struttura.
La linea di confezionamento automatico per smistamento delle ciambelle di Hengjiang combina robot SCARA e delta in una configurazione coordinata specificamente ottimizzata per le caratteristiche fisiche delle ciambelle — forme rotonde o ovali, texture morbida e deformabile, superfici di smalto varie e alte velocità di linea da friggitrici o livellatori ad alta capacità. Questa linea è documentata nelUso combinato di SCARA e robot deltasezione del portafoglio integrato di postazioni di lavoro di Hengjiang.
Perché le ciambelle richiedono una linea specializzata: le ciambelle presentano sfide uniche nella manipolazione. La loro superficie morbida e appiccicosa rende la scelta della coppa a vuoto fondamentale: troppa aspirazione deforma il prodotto; Troppo poco causa cadute. La loro geometria circolare rende il controllo dell'orientamento meno critico rispetto ai prodotti direzionali, ma una distanza costante nel vassoio di imballaggio è essenziale per la presentazione. Le linee di ciambelle ad alto volume (friggitrici industriali che producono 3.000–6.000 pezzi all'ora) richiedono cluster robotici capaci di una capacità prolungata senza degradare le prestazioni dovute alla fatica durante operazioni a più turni.
Configurazione della linea per le ciambelle: i robot Delta gestiscono il compito principale di pick-and-place ad alta velocità dal nastro trasportatore di uscita della friggitrice verso i vassoi intermedi. Le loro velocità di ciclo di 60–100 prelievi al minuto per unità, combinate in un cluster di tre o quattro robot, corrispondono alle velocità di produzione delle friggitrici industriali. I robot SCARA si occupano quindi del compito secondario: raccogliere ciambelle pre-selezionate da vassoi intermedi e inserirle in confezioni retail con orientamento preciso, verifica del conteggio e impilamento degli strati. Questa divisione del lavoro si basa sulla forza di ogni tipo di robot — delta per la velocità bruta, SCARA per un posizionamento preciso e un carico utile più pesante.
Compatibilità della glassa: Gli stampi per effetto finale nella linea delle ciambelle sono progettati per superfici glassate, rivestite di zucchero e semplici. Le ventose in silicone con regolatori di vuoto regolabili compensano la variazione superficiale. L'algoritmo di normalizzazione della riflettanza del sistema visionario gestisce la variazione di contrasto tra smalti opachi e lucidi senza richiedere una calibrazione separata per ogni variante di prodotto.
Integrazione con la linea di formazione: questa linea di imballaggio si interfaccia direttamente con quella di HengjiangLinea di produzione per la formatura delle ciambelle, creando una catena continua dalla produzione al confezionamento. Hengjiang offre consegne chiavi in mano di progetti che coprono sia la linea di formatura sia quella di smistamento e confezionamento sotto un unico contratto, con commissione e formazione unificata degli operatori.
IlLinea di confezionamento automatica per la selezione delle pizzea Hengjiang utilizza implementazioni di robot delta a doppia o più unità per gestire la selezione e l'imballaggio delle pizze surgelate, affrontando le sfide specifiche dei prodotti alimentari piatti e di grande diametro che devono essere messi in cartoni con precisione millimetrica.
Sfide specifiche per la gestione della pizza: Le pizze surgelate sono grandi (tipicamente 200–350 mm di diametro), relativamente pesanti rispetto a ciambelle o pasticceri (200–500 g per unità) e devono essere inserite in custodie a tolleranza stretta senza danneggiare i bordi allo strato di copertura o alla crosta. Le dimensioni interne del cartone lasciano solo 3–5 mm di spazio per lato, il che significa che la precisione e la ripetibilità del robot devono essere più strette della tolleranza al passaggio. L'HJ-D11003-1 di Hengjiang con asse rotante raggiunge una ripetibilità di posizionamento di ±0,5 mm sul piano XY a piena velocità operativa — ben entro la tolleranza richiesta per i formati standard di cartoni di pizza.
Configurazioni a doppia unità e a più unità delta: Le linee per pizze documentate nel portfolio di Hengjiang includono la Linea A per la Classificazione e il Packaging della Pizza e la Linea B per la Classificazione e Confezionamento della Pizza, che rappresentano diversi livelli di throughput e configurazioni di layout. La Linea A utilizza un cluster delta a due robot per linee a capacità media (800–1.500 pizze all'ora). La Linea B utilizza un cluster di tre o quattro robot per linee ad alta capacità che corrispondono alla potenza dei forni industriali a terrazza o dei sistemi di cottura a tunnel. Entrambe le linee utilizzano la stessa architettura di visione e controllo, differendo solo per il numero di robot e la larghezza dei trasportatori.
Montaggio e sigillatura dei cartoni: La linea di imballaggio integra un montatore automatico di cartoni all'ingresso della zona di imballaggio, un modulo di caricamento robotizzato dove i robot Delta inseriscono le pizze in cartoni eretti, e una stazione di sigillatura con colla a caldo all'outlet. Un sistema di etichettatura stampa-and-apply applica informazioni variabili (codice batch, data di prescrizione preferita, peso) immediatamente dopo la sigillatura. L'intera sequenza, dalla ripresa della pizza al cartone sigillato etichettato, si completa in meno di 8 secondi per unità sulla linea ad alta capacità.
Considerazioni sulle zone fredde: Le linee per pizza surgelata operano in zone di produzione a bassa temperatura (tipicamente da 0°C a 10°C ambienti). I robot delta di Hengjiang sono dotati di grasso a bassa temperatura per tutte le superfici di supporto e avvolgimenti sigillati per motori progettati per un funzionamento prolungato in ambienti di camera fredda. La gestione della condensa nell'armadietto elettrico utilizza riscaldatori controllati termostaticamente per prevenire l'accumulo di umidità durante le transizioni di temperatura.
Integrazione a monte: La linea di selezione e confezionamento delle pizze si collega direttamente a Hengjiang'sLinea di produzione per la formazione della pizzae la relativa uscita del tunnel di cottura. Questo permette di approvvigionare un progetto completo di automazione di una fabbrica di pizza da un unico fornitore, semplificando la gestione del progetto, la responsabilità di garanzia e il coordinamento del servizio a lungo termine.
Per dimostrazioni video di entrambe le configurazioni della linea pizza in funzione, visita ilSezione video dei robot da forno.
Hengjiang Intelligent Technology Co., Ltd. è un produttore verticalmente integrato: progettazione meccanica, sviluppo di servo-drive, software di controllo del movimento dei robot, algoritmi di visione artificiale e integrazione di sistemi sono tutti eseguiti internamente. Ciò significa che non ci sono rischi di compatibilità tra fornitori nelle interfacce critiche tra robot, visione e controllo — un punto di guasto comune nei sistemi integrati di terze parti.
Tutte le attrezzature sono sottoposte a un rigoroso test di accettazione in fabbrica (FAT) presso lo stabilimento di Hengjiang prima della spedizione, simulando le condizioni produttive del cliente con prodotti rappresentativi. L'installazione e la messa in servizio sono eseguite dal team tecnico di Hengjiang. Il supporto post-commissione include il monitoraggio remoto tramite la piattaforma di controllo abilitata IoT, con accesso in tempo reale a log di guasti, dati ciclici e metriche di prestazione. Per una descrizione completa del quadro di servizio — inclusi protocolli di ispezione delle apparecchiature, standard di installazione e termini di garanzia — si riferisce alServizio e supportopagine.
Hengjiang offre anche linee di produzione complete di panificazione che coprono le categorie di pasticceria, croissant, crostata all'uovo, ciambella, pizza e torta. Quando una linea robotica di smistamento e confezionamento viene abbinata a una linea di formatura e cottura Hengjiang, il risultato è una cella intelligente di fabbrica completamente automatizzata con un unico punto di responsabilità tecnica. Esplora l'interoPortafoglio linee di produzioneper opzioni di attrezzature a monte, oppure visitare ilPagina aziendale del gruppo HexeonPer informazioni sul background aziendale, capacità produttiva e cultura.
Per richieste specifiche di prodotto, discussioni sui prezzi o accordi di visita in fabbrica, utilizza ilPagina dei contattiper raggiungere direttamente il team tecnico di vendita di Hengjiang.